

Next Oscar showed us this abstraction, with a lever on which we can exert torque:
To control torque, control current.
We can calculate the torque in the system above using this formula:

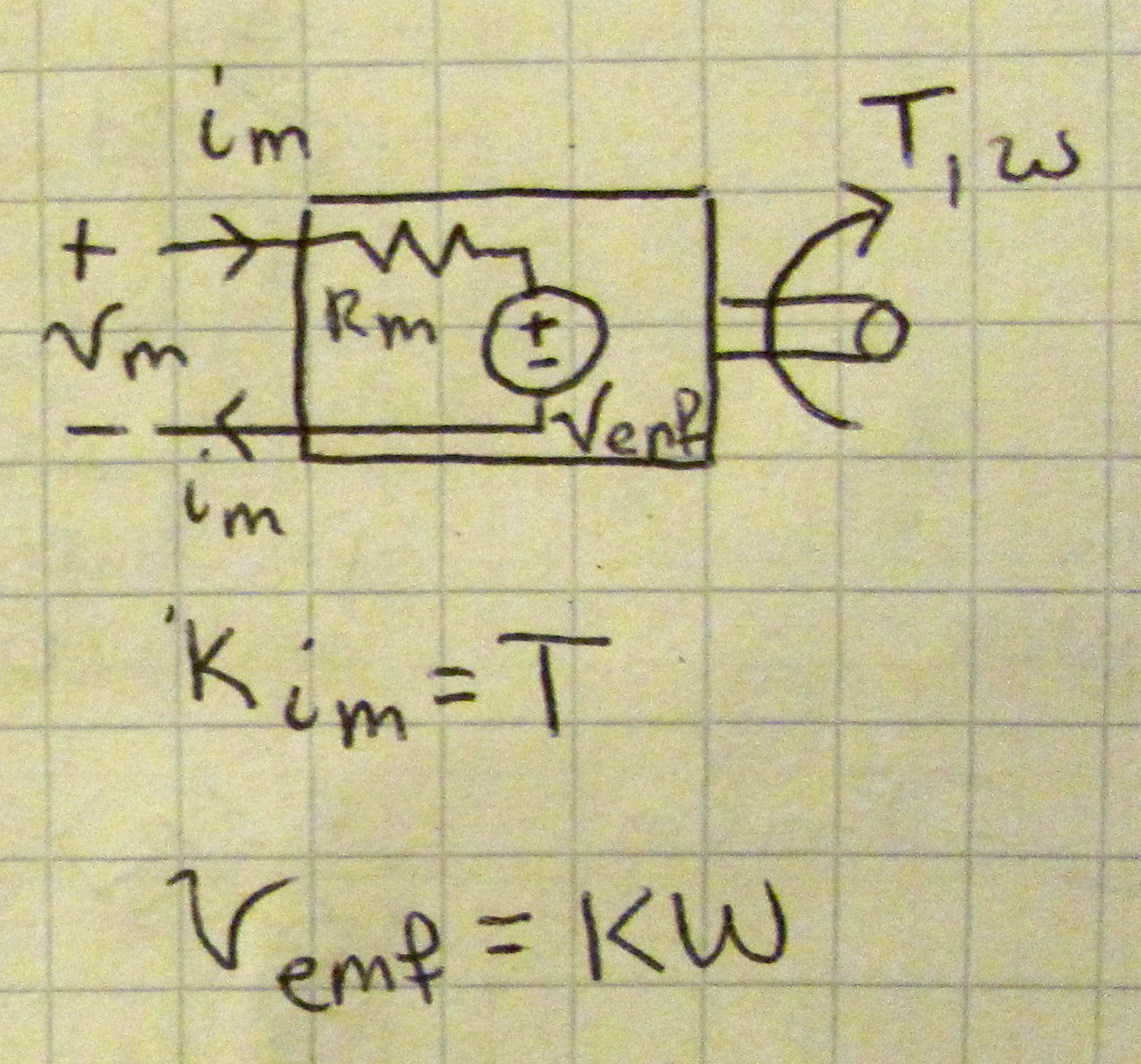
Next Oscar showed us a complex circuit with a current driver and explained the formulas that allow us to calculate the voltage and resistance at various points in the circuit. We use two potentiometers (upper right, written in red) and a motor (depicted in an abstraction shown as a circle with little nibs coming out of it. We can calculate the voltage of the motor as being the resistance times energy of the motor plus the potential difference of the voltage). This particular circuit was hard for me to grasp completely.

We went to our breadboards and connected Lego motors to an op-amp. When we have negative feedback, a virtual ground is created (as you can see in the picture above). We were able to control the motor's direction and rotational speed with the potentiometers. We added a giant Lego wheel to the end. This reminded me of our first day in engineering class where Oscar had an example for us showing a wheel and motor attached to an oscilloscope.

The last thing we did in class was calculate the voltage across this circuit. I'll let the picture below explain it:

No comments:
Post a Comment